

Tampilan:0 Penulis:Editor Situs Publikasikan Waktu: 2025-05-21 Asal:Situs








Baru -baru ini, Konferensi Global ICRA 2025 di bidang robotika dan otomatisasi dibuka di Atlanta, AS. Metode 'meningkatkan estimasi niat manusia dan alokasi peran untuk kolaborasi robot manusia fisik ' yang diusulkan bersama oleh Institute of Automation of Chinese Academy of Sciences dan Lingbao Casbot diterima oleh ICRA 2025.
01. DTRT: Meningkatkan estimasi niat manusia dan alokasi peran mesin manusia dalam kolaborasi mesin manusia fisik
Estimasi niat manusia yang akurat dan alokasi peran manusia-mesin yang masuk akal sangat penting untuk kolaborasi yang aman dan efisien dalam kolaborasi robot fisik manusia (PHRC). Metode yang ada yang mengandalkan data gerak jangka pendek untuk estimasi niat tidak memiliki kemampuan prediksi multi-langkah, yang menghambat kemampuan robot untuk memahami perubahan niat jangka panjang dan secara mandiri menyesuaikan alokasi mesin manusia, yang mengarah pada potensi divergensi mesin manusia. Untuk menyelesaikan masalah ini, Institute of Automation of Chinese Academy of Sciences dan Lingbao Casbot bersama -sama mengusulkan kerangka kerja robot Tracker (DTRT) berbasis transformator ganda. Kerangka kerja ini mengadopsi struktur hierarkis, dan menggunakan data gerak manusia dan memaksa untuk dengan cepat menangkap perubahan niat manusia, sehingga dapat mencapai prediksi lintasan yang akurat dan penyesuaian perilaku robot dinamis, dan pada akhirnya mencapai kerja sama fisik-komputer fisik yang efektif.
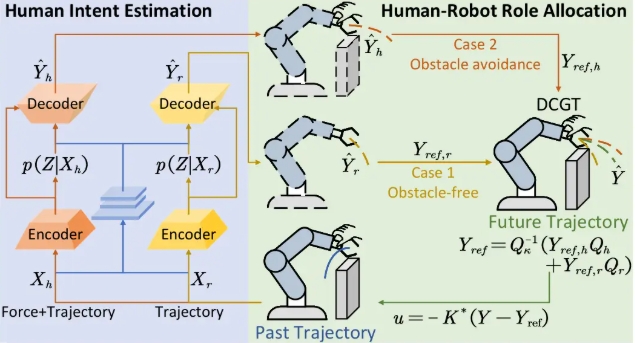
Pelacak Robot Berdasarkan Ganda Transformer untuk Estimasi Niat Manusia dan Penugasan Peran
Secara khusus, estimasi niat manusia dalam DTRT menggunakan dua autoencoder variasional bersyarat berbasis transformator (CVAE) untuk menggabungkan data gerak robot dalam situasi bebas hambatan dengan lintasan dan kekuatan yang dipandu manusia selama penghindaran hambatan. Selain itu, kami menggunakan diferensial cooperative game teorie (DCGT) berdasarkan kekuatan yang diterapkan manusia untuk mengintegrasikan kedua prediksi, memastikan bahwa perilaku robot konsisten dengan niat manusia. Dibandingkan dengan metode yang ada, DTRT menggabungkan dinamika manusia ke dalam prediksi jangka panjang, memberikan pemahaman niat yang akurat, mencapai alokasi peran yang masuk akal, dan meningkatkan otonomi dan operasi robot.
02. Kolaborasi fisik manusia-mesin menghadapi tantangan ganda prediksi niat dan alokasi peran
Fisik manusia-mesin kolaborasi (PHRC) sangat penting dalam manufaktur, perawatan kesehatan, dan layanan. Diperlukan strategi yang efektif untuk memastikan bahwa robot dapat berkolaborasi secara mulus dengan manusia, secara akurat memperkirakan niat, dan secara dinamis menyesuaikan perilaku untuk membantu manusia. Oleh karena itu, estimasi niat manusia yang akurat dan alokasi peran mesin manusia yang masuk akal adalah tantangan utama dalam meningkatkan kinerja PHRC.
Prediksi lintasan masa depan yang akurat berdasarkan niat manusia sangat penting untuk efektivitas bantuan robot dan keselamatan PHRC. Dalam lingkungan yang kompleks dengan bahaya potensial, seperti ketika robot mengalami hambatan yang tidak diketahui, perubahan cepat dalam niat manusia menimbulkan tantangan yang signifikan terhadap estimasi niat. Metode saat ini terutama bergantung pada data gerak jangka pendek, seperti posisi dan kecepatan, yang membatasi deteksi perubahan niat manusia dan akan mempengaruhi keakuratan dan keamanan prediksi.
Selain itu, data jangka pendek dapat mengurangi efektivitas estimasi niat dalam kolaborasi jangka panjang. Oleh karena itu, meneliti metode prediksi jangka panjang yang mengintegrasikan kekuatan yang diterapkan manusia ke dalam pHRC sangat penting untuk mencapai estimasi niat yang akurat. Selain itu, alokasi peran manusia-mesin melibatkan mekanisme yang kompleks untuk menetapkan kontrol tugas antara manusia dan robot. Proses ini akan mengoordinasikan hubungan manusia-mesin secara real-time, mengurangi ketidaksepakatan, dan meningkatkan tingkat bantuan robot. Metode yang ada terutama bergantung pada kontrol impedansi/kepatuhan, dan menentukan peran dengan memodifikasi parameter model. Di antara berbagai metode, alokasi peran berdasarkan teori permainan mensimulasikan proses kolaboratif di antara banyak peserta, dengan tujuan meminimalkan fungsi biaya untuk mencapai kolaborasi mesin manusia yang optimal. Namun, memastikan bahwa perilaku robot konsisten dengan niat manusia sambil mempertahankan otonomi dan fleksibilitas tetap menjadi tantangan utama.
03. DTRT menunjukkan keunggulan yang signifikan dalam akurasi prediksi dan kinerja kolaboratif
Hasil eksperimen menunjukkan bahwa DTRT memiliki keunggulan yang signifikan dalam akurasi prediksi, menunjukkan kinerja yang sangat baik dalam berbagai indikator kolaborasi fisik manusia-mesin, secara efektif mengurangi divergensi mesin manusia dan meningkatkan tingkat bantuan robot, dengan potensi besar untuk aplikasi. Keuntungan inti dari DTRT terletak pada tiga poin berikut:
DTRT menggabungkan estimasi niat manusia dengan alokasi peran manusia-mesin untuk mendeteksi perubahan niat dan mengurangi divergensi mesin manusia, secara efektif meningkatkan kinerja kolaborasi mesin manusia di lingkungan yang kompleks dan berbahaya.
2. Estimasi niat manusia berbasis struktur hierarkis dalam DTRT secara bersamaan memproses gerakan dan memaksa data dalam kolaborasi manusia-mesin, meningkatkan akurasi prediksi niat manusia dan memberikan pemahaman yang akurat tentang niat.
3. Alokasi peran manusia-mesin berdasarkan pada teori permainan koperasi diferensial mewujudkan pengalihan pemimpin adaptif berdasarkan kekuatan yang diberikan oleh manusia, memastikan bahwa perilaku robot konsisten dengan niat manusia dan mengurangi divergensi sambil mempertahankan otonomi robot.
Dalam hal kinerja kolaborasi manusia-mesin fisik, indikator berikut digunakan:
Dalam percobaan, kami menggantikan dan berlokasi secara acak. Hasilnya menunjukkan bahwa DTRT mengungguli metode yang ada dalam skenario kolaborasi fisik manusia-mesin. Sudut kolaborasi manusia rata-rata DTRT adalah 76,4 °, indeks tingkat bantuan robot rata-rata adalah 1,5, dan sistem mesin manusia dalam keadaan kolaboratif 61,8% dari waktu. Selain itu, alokasi peran mesin manusia secara efektif menyeimbangkan otonomi robot dan bimbingan manusia, menghasilkan hanya 3,5 J pekerjaan mekanik manusia. Secara keseluruhan, DTRT secara akurat memperkirakan perubahan niat manusia, secara wajar mengalokasikan peran para pemimpin dan pengikut, sehingga mengurangi divergensi mesin manusia, meningkatkan tingkat bantuan robot, dan mempromosikan kolaborasi fisik manusia-mesin yang aman dan efisien.
Perbandingan kuantitatif antara DTRT dan metode yang ada dalam hal indikator
Proposal DTRT bukan hanya terobosan algoritma, tetapi juga upaya untuk merekonstruksi 'hubungan mesin manusia ': ini memberikan jalur teknis untuk pengembangan robot humanoid yang menggabungkan universalitas dan nilai teknik. Di masa depan, ide -ide penelitian dan mekanisme inti DTRT diharapkan untuk terus memperluas dan memperdalam berbagai skenario aplikasi praktis yang difokuskan oleh Lingbao Casbot, seperti manufaktur industri, operasi yang kompleks, dan kolaborasi layanan.

















